Electroactive polymers, or EAPs, are polymers that exhibit a change in size or shape when stimulated by an electric field. The most common applications of this type of material are in actuators and sensors. A typical characteristic property of an EAP is that they will undergo a large amount of deformation while sustaining large forces.
The majority of historic actuators are made of ceramic piezoelectric materials. While these materials are able to withstand large forces, they commonly will only deform a fraction of a percent. In the late 1990s, it has been demonstrated that some EAPs can exhibit up to a 380% strain, which is much more than any ceramic actuator. One of the most common applications for EAPs is in the field of robotics in the development of artificial muscles; thus, an electroactive polymer is often referred to as an artificial muscle.
History
The field of EAPs emerged back in 1880, when Wilhelm Röntgen designed an experiment in which he tested the effect of an electric current on the mechanical properties of a rubber band. The rubber band was fixed at one end and was attached to a mass at the other. It was then charged and discharged to study the change in length with electric current. M.P. Sacerdote followed up on Roentgen's experiment by formulating a theory on strain response to an applied electric field in 1899. It wasn’t until 1925 that the first piezoelectric polymer was discovered (Electret). Electret was formed by combining carnauba wax, rosin and beeswax, and then cooling the solution while it is subject to an applied DC electrical bias. The mixture would then solidify into a polymeric material that exhibited a piezoelectric effect.
Polymers that respond to environmental conditions other than an applied electric current have also been a large part of this area of study. In 1949, Katchalsky et al. demonstrated that when collagen filaments are dipped in acid or alkali solutions they would respond with a change in volume. The collagen filaments were found to expand in an acidic solution and contract in an alkali solution. Although other stimuli (such as pH) have been investigated, due to its ease and practicality most research has been devoted to developing polymers that respond to electrical stimuli in order to mimic biological systems.
The next major breakthrough in EAPs took place in the late 1960s. In 1969, Kawai demonstrated that polyvinylidene fluoride (PVDF) exhibits a large piezoelectric effect. This sparked research interest in developing other polymers systems that would show a similar effect. In 1977, the first electrically conducting polymers were discovered by Hideki Shirakawa et al. Shirakawa along with Alan MacDiarmid and Alan Heeger demonstrated that polyacetylene was electrically conductive, and that by doping it with iodine vapor, they could enhance its conductivity by 8 orders of magnitude. Thus the conductance was close to that of a metal. By the late 1980s a number of other polymers had been shown to exhibit a piezoelectric effect or were demonstrated to be conductive.
In the early 1990s, ionic polymer-metal composites were developed and shown to exhibit electroactive properties far superior to previous EAPs. The major advantage of IPMCs was that they were able to show activation (deformation) at voltages as low as 1 or 2 volts. This is orders of magnitude less than any previous EAP. Not only was the activation energy for these materials much lower, but they could also undergo much larger deformations. IPMCs were shown to exhibit anywhere up to 380% strain, orders of magnitude larger than previously developed EAPs.
In 1999, Yoseph Bar-Cohen, proposed the Armwrestling Match of EAP Robotic Arm Against Human Challenge. This was a challenge in which research groups around the world competed to design a robotic arm consisting of EAP muscles that could defeat a human in an arm wrestling match. The first challenge was held at the Electroactive Polymer Actuators and Devices Conference in 2005. Another major milestone of the field is that the first commercially developed device including EAPs as an artificial muscle was produced in 2002 by Eamex in Japan. This device was a fish that is able to swim on its own, moving its tail using an EAP muscle. But the progress in practical development is not satisfactory.
Types of Electroactive Polymers
Dielectric EAPs
Dielectric EAPs, are materials in which actuation is caused by electrostatic forces between two electrodes which squeeze the polymer. Dielectric elastomers are capable of very high strains and are fundamentally a capacitor that changes its capacitance when a voltage is applied by allowing the polymer to compress in thickness and expand in area due to the electric field. This type of EAP typically requires a large actuation voltage to produce high electric fields (hundreds to thousands of volts), but very low electrical power consumption. Dielectric EAPs require no power to keep the actuator at a given position. Examples are electrostrictive polymers and dielectric elastomers.
Ferroelectric Polymers
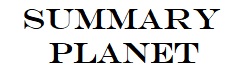
Ferroelectric polymers are a group of crystalline polar polymers that are also ferroelectric, meaning that they maintain a permanent electric polarization that can be reversed, or switched, in an external electric field. Ferroelectric polymers, such as polyvinylidene fluoride(PVDF), are used in acoustic transducers and electromechanical actuators because of their inherent piezoelectric response, and as heat sensors because of their inherent pyroelectric response.
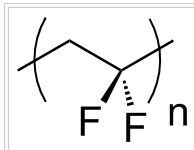
Figure 1: Structure of Poly(vinylidene fluoride)
Electrostrictive Graft Polymer
Figure 2: Cartoon of an electrostrictive graft polymer.
Electrostrictive graft polymers consist of flexible backbone chains with branching side chains. The side chains on neighboring backbone polymers cross link and form crystal units. The backbone and side chain crystal units can then form polarized monomers, which contain atoms with partial charges and generate dipole moments, shown in Figure 2. When an electrical field is applied, a force is applied to each partial charge and causes rotation of the whole polymer unit. This rotation causes electrostrictive strain and deformation of the polymer.
Liquid Crystalline Polymers
Main-chain liquid crystalline polymers have mesogenic groups linked to each other by a flexible spacer. The mesogens within a backbone form the mesophase structure causing the polymer itself to adopt a conformation compatible with the structure of the mesophase. The direct coupling of the liquid crystalline order with the polymer conformation has given main-chain liquid crystalline elastomers a large amount of interest. The synthesis of highly oriented elastomers leads to have a large strain thermal actuation along the polymer chain direction with temperature variation resulting in unique mechanical properties and potential applications as mechanical actuators.
Ionic EAPs
Ionic EAPs, in which actuation is caused by the displacement of ions inside the polymer. Only a few volts are needed for actuation, but the ionic flow implies a higher electrical power needed for actuation, and energy is needed to keep the actuator at a given position. Examples of ionic EAPS are conductive polymers, ionic polymer-metal composites (IPMCs), and responsive gels. Yet another example is a Bucky gel actuator, which is a polymer-supported layer of polyelectrolyte material consisting of an ionic liquid sandwiched between two electrode layers consisting of a gel of ionic liquid containing single-wall carbon nanotubes. The name is shaped by similatity on the name of the paper that can be made by filtering carbon nanotubes, the so-called bucky paper.
Electrorheological Fluid
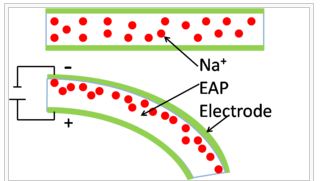
Figure 3: The cations in the ionic polymer-metal composite are randomly oriented in the absence of an electric field. Once a field is applied the cations gather to the side of the polymer in contact with the anode causing the polymer to bend.
Electrorheological fluids change the viscosity of a solution with the application of an electric field. The fluid is a suspension of polymers in a low dielectric-constant liquid. With the application of a large electric field the viscosity of the suspension increases. Potential applications of these fluids include shock absorbers, engine mounts and acoustic dampers.
Ionic polymer-metal composite
Ionic polymer-metal composites consist of a thin ionomeric membrane with noble metal electrodes plated on its surface. It also has cations to balance the charge of the anions fixed to the polymer backbone. They are very active actuators that show very high deformation at low applied voltage and show low impedance. Ionic polymer-metal composites work through electrostatic attraction between the cationic counter ions and the cathode of the applied electric field, a schematic representation is shown in Figure 3. These types of polymers show the greatest promise for bio-mimetic uses as collagen fibers are essentially composed of natural charged ionic polymers. Nafion and Flemion are commonly used ionic polymer metal composites.
Stimuli-responsive gels
Stimuli-responsive gels (hydrogels, when the swelling agent is an aqueous solution) are a special kind of swellable polymer networks with volume phase transition behaviour. These materials change reversibly their volume, optical, mechanical and other properties by very small alterations of certain physical (e.g. electric field, light, temperature) or chemical (concentrations) stimuli. The volume change of these materials occurs by swelling/shrinking and is diffusion-based. Gels provide the biggest change in volume of solid-state materials. Combined with an excellent compatibility with micro fabrication technologies, especially stimuli-responsive hydrogels are of strong increasing interest for microsystems with sensor and actuator functionalities. Current fields of research and application are chemical sensor systems, microfluidics and multimodal imaging systems.
Source: http://www.assignmentpoint.com/wp-content/uploads/2015/09/Electroactive-Polymers.doc
Web site to visit: http://www.assignmentpoint.com
Author of the text: indicated on the source document of the above text
If you are the author of the text above and you not agree to share your knowledge for teaching, research, scholarship (for fair use as indicated in the United States copyrigh low) please send us an e-mail and we will remove your text quickly. Fair use is a limitation and exception to the exclusive right granted by copyright law to the author of a creative work. In United States copyright law, fair use is a doctrine that permits limited use of copyrighted material without acquiring permission from the rights holders. Examples of fair use include commentary, search engines, criticism, news reporting, research, teaching, library archiving and scholarship. It provides for the legal, unlicensed citation or incorporation of copyrighted material in another author's work under a four-factor balancing test. (source: http://en.wikipedia.org/wiki/Fair_use)
The information of medicine and health contained in the site are of a general nature and purpose which is purely informative and for this reason may not replace in any case, the council of a doctor or a qualified entity legally to the profession.
The texts are the property of their respective authors and we thank them for giving us the opportunity to share for free to students, teachers and users of the Web their texts will used only for illustrative educational and scientific purposes only.
All the information in our site are given for nonprofit educational purposes